
Activity-Aware Recovery from Network Communication Loss in Teleoperated Robotic Surgery
Published in IEEE Transactions on Medical Robotics and Bionics, 2026
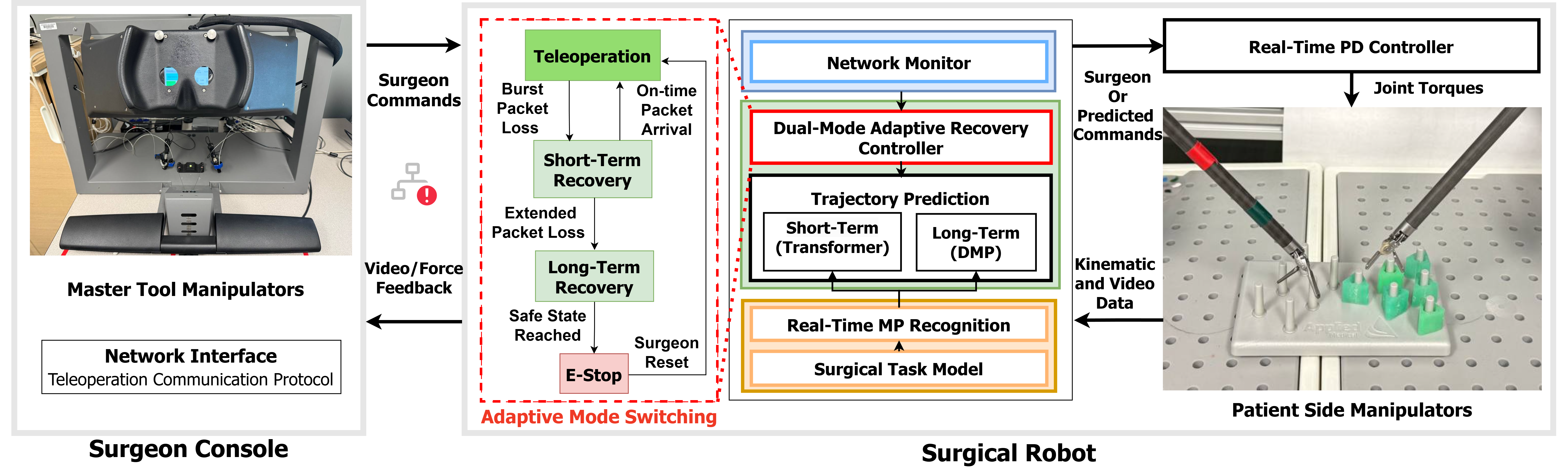
This paper addresses the safety risks of packet drops and prolonged communication failures in teleoperated robotic surgery. It introduces an activity-aware shared-control framework that combines two recovery modes: a context-aware Transformer for short-term prediction of surgeon commands and a library of Dynamic Movement Primitives for long-term autonomous completion of the current surgical subtask.
Using surgical activity recognition and task knowledge to guide recovery, the framework reduces trajectory deviation under severe packet loss and improves end-to-end recovery performance compared with using filtering or a single recovery strategy alone. The result is a more fault-tolerant approach to maintaining safe telesurgical behavior during diverse network disruptions.