
A Comprehensive Analysis of the Effects of Network Quality of Service on Robotic Telesurgery
Published in IEEE International Conference on Robotics and Automation (ICRA), 2026
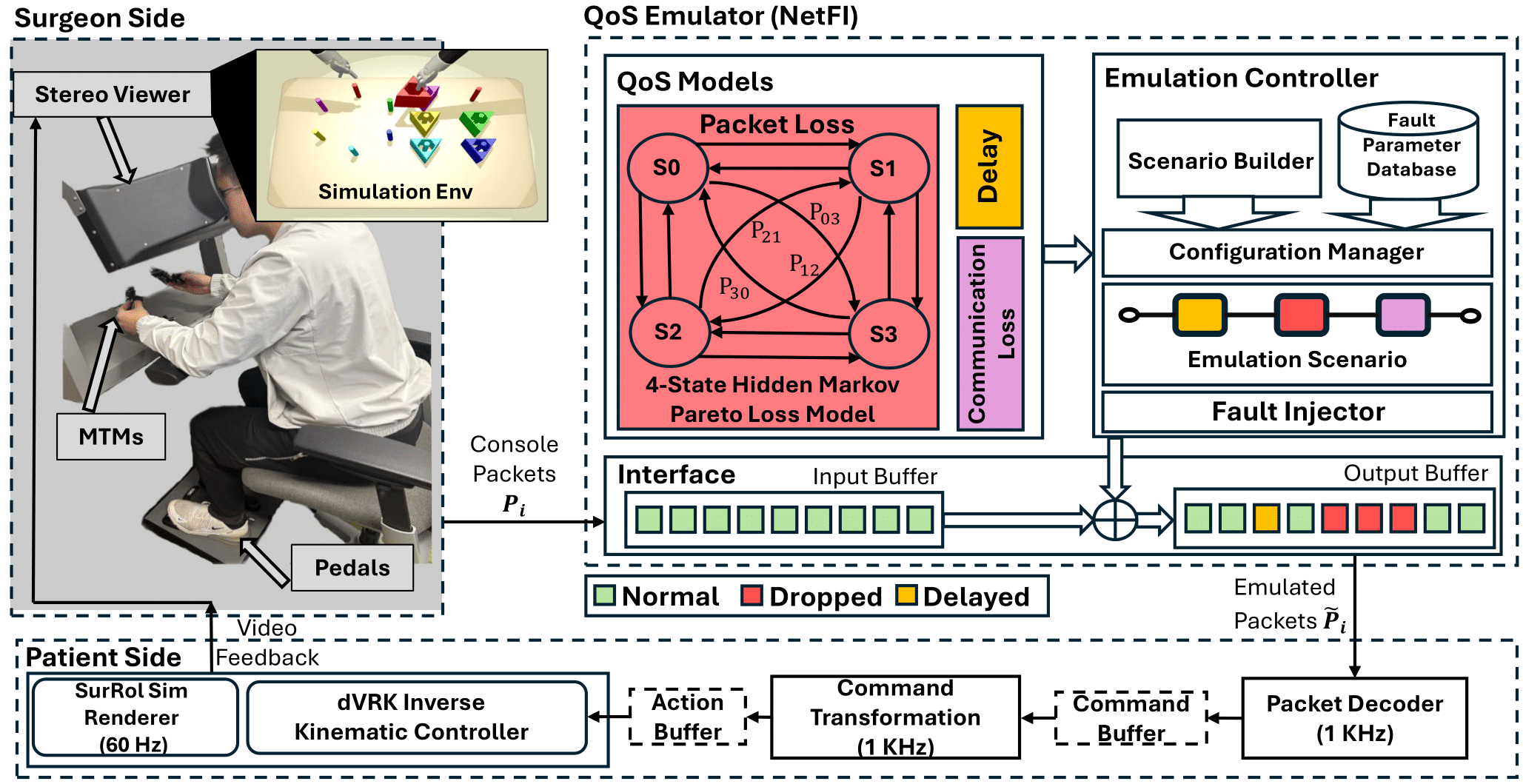
This paper studies how realistic network degradations shape the safety and usability of robotic telesurgery. It introduces NetFI, a model-based fault injection tool that emulates packet loss, delay, and communication loss using stochastic quality-of-service models derived from real network behavior, then integrates the emulator into a telesurgical simulation platform for controlled experimentation.
Through a user study with participants of different proficiency levels, the work analyzes both overall task outcomes and fine-grained motion primitives using objective performance metrics, safety events, and subjective workload measures. The results identify which surgical actions are most vulnerable to degraded network conditions and provide practical evidence for designing network-aware control, autonomy, and mitigation strategies.