Publications
Recent publications and preprints on dependable robotic surgery, telesurgery, and multimodal surgical AI.
Submitted to The International Journal of Medical Robotics and Computer Assisted Surgery, 2026
MiDAS is an open, platform-agnostic system for synchronized multimodal data collection in robotic surgery, enabling non-invasive sensing and releasing new datasets for activity recognition research.
Download here
Published in IEEE International Conference on Robotics and Automation (ICRA), 2026
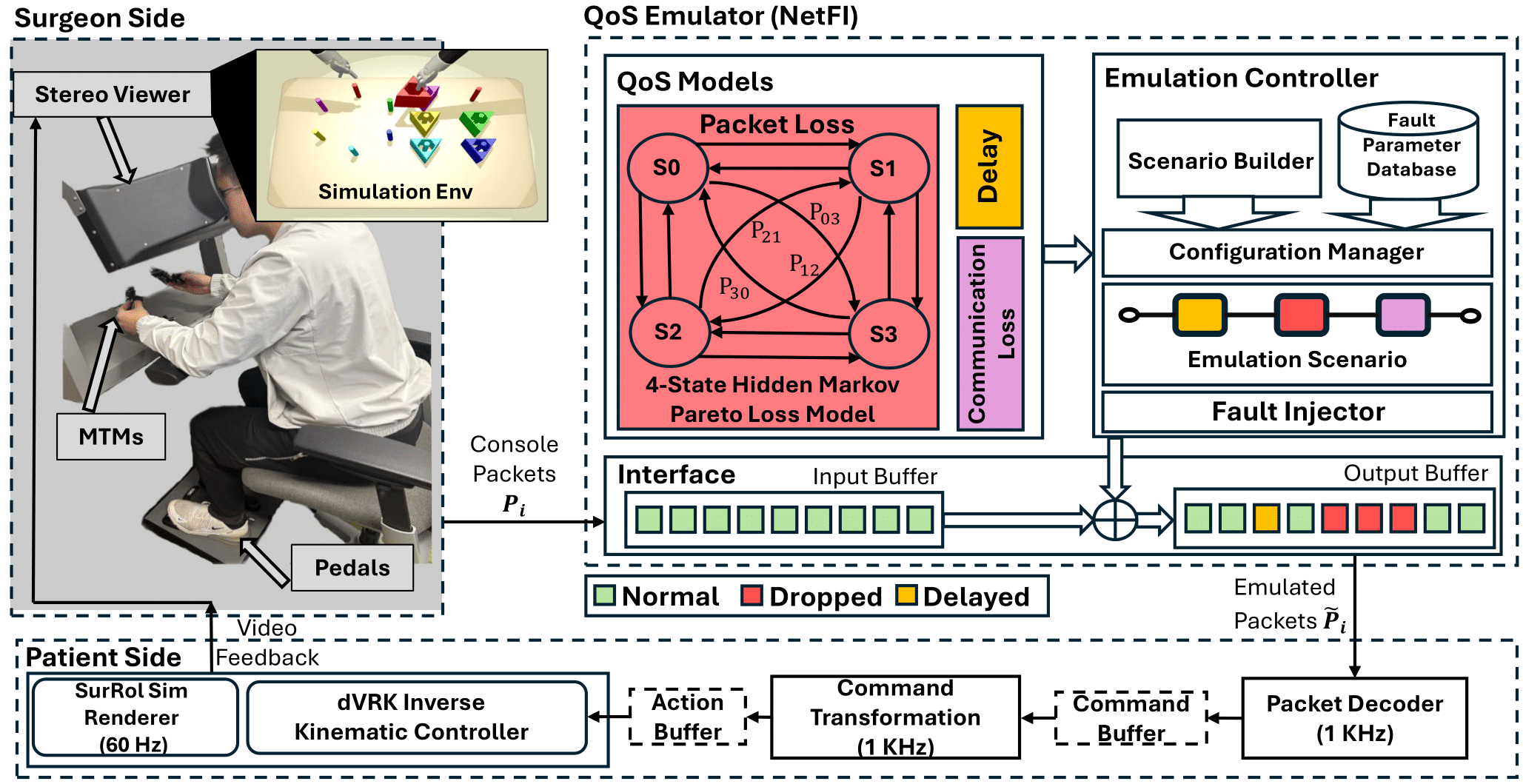
This work introduces NetFI and quantifies how packet loss, delay, and communication loss affect telesurgical performance, safety, and workload at both the task and motion-primitive levels.
Download here
Submitted to IEEE Transactions on Medical Robotics and Bionics, 2026
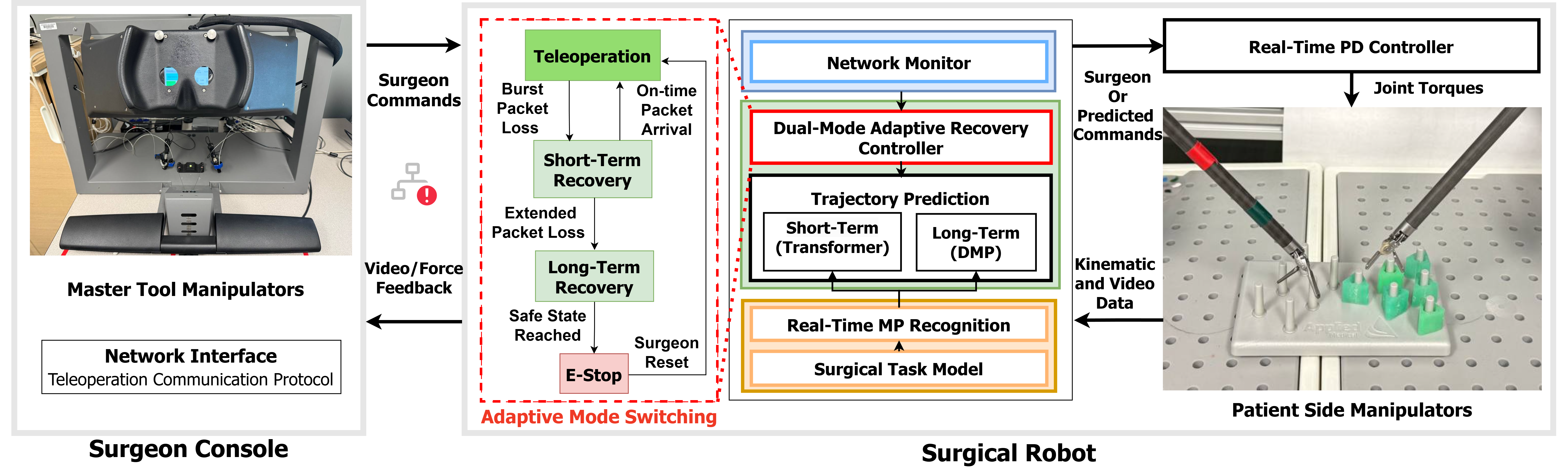
This paper proposes a dual-mode recovery framework that predicts surgeon commands during short disruptions and autonomously completes the current subtask during prolonged communication loss.
Download here
Published in IEEE International Conference on Robotics and Automation (ICRA), 2024
This paper introduces a multimodal transformer that fuses kinematic and video data for real-time surgical gesture and trajectory prediction, improving accuracy while staying fast enough for deployment.
Download here
Published in RoboCup Small Size League, 2018
This paper describes the PARSIAN RoboCup SSL team’s 2018 system, highlighting hardware upgrades, a ROS-based microservice software architecture, motion correction, profiling tools, and fault-recovery improvements.
Download here